Difference between revisions of "MYOD"
(→Pecho) |
|||
| (24 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
| − | [[File:MYOD Blend.png|400px|right]] | + | [[File:MYOD Blend.png|border|400px|right]] |
El proyecto MYOD es una iniciativa llevado a cabo por alumnos de ingeniería que tiene como objetivo el desarrollo, construccion y programación de un robot mini-humanoide. | El proyecto MYOD es una iniciativa llevado a cabo por alumnos de ingeniería que tiene como objetivo el desarrollo, construccion y programación de un robot mini-humanoide. | ||
| Line 7: | Line 7: | ||
* Imprimible: Todas las piezas se diseñarán para que puedan imprimirse fácilmente con una impresora 3D. | * Imprimible: Todas las piezas se diseñarán para que puedan imprimirse fácilmente con una impresora 3D. | ||
* Barato: Las plataformas comunes suelen ser bastante caras y usualmente prohibitivas al público general. En MYOD queremos romper con esto, adoptando la filosofia low-cost para abaratar costes. | * Barato: Las plataformas comunes suelen ser bastante caras y usualmente prohibitivas al público general. En MYOD queremos romper con esto, adoptando la filosofia low-cost para abaratar costes. | ||
| + | |||
| + | |||
| + | Listado de [[robots humanoides]] de la asociación. | ||
=Redes Sociales= | =Redes Sociales= | ||
| Line 16: | Line 19: | ||
| [[File:Twitter_logo1.jpg|150px|link=https://twitter.com/MYOD_Robotics]] | | [[File:Twitter_logo1.jpg|150px|link=https://twitter.com/MYOD_Robotics]] | ||
| [[File:Google-Plus-Logo.png|150px|link=https://plus.google.com/109980958219449795504/posts]] | | [[File:Google-Plus-Logo.png|150px|link=https://plus.google.com/109980958219449795504/posts]] | ||
| − | |||
|} | |} | ||
=Componentes= | =Componentes= | ||
==Piezas Imprimibles== | ==Piezas Imprimibles== | ||
| + | |||
| + | Todas las piezas están sujetas a cambios, el diseño aún no es definitivo. | ||
| + | |||
===Pecho=== | ===Pecho=== | ||
{| class="wikitable" style="text-align:center" border="0" | {| class="wikitable" style="text-align:center" border="0" | ||
| Line 29: | Line 34: | ||
|Detalles | |Detalles | ||
|Tiempo de Impresión | |Tiempo de Impresión | ||
| − | |||
| − | |||
| − | |||
|- align="center" | |- align="center" | ||
| Pecho | | Pecho | ||
| − | |[[File:MYOD_Chest.png|200px|link=https://github.com/ | + | |[[File:MYOD_Chest.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/chest/chest/chest_b.stl ]] |
|1 | |1 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/chest/chest/chest_b.stl chest.stl] |
| | | | ||
| | | | ||
| Line 42: | Line 44: | ||
|- align="center" | |- align="center" | ||
| Pechera | | Pechera | ||
| − | |[[File:MYOD_Bumper.png|200px|link=https://github.com/ | + | |[[File:MYOD_Bumper.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/chest/bumper1/bumper.STL ]] |
|1 | |1 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/chest/bumper1/bumper.STL bumper.stl] |
| | | | ||
| | | | ||
| Line 50: | Line 52: | ||
|- align="center" | |- align="center" | ||
| Cubierta | | Cubierta | ||
| − | |[[File:MYOD_Cover.png|200px|link=https://github.com/ | + | |[[File:MYOD_Cover.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/chest/bumper1/join_bumper.STL ]] |
| + | |1 | ||
| + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/chest/bumper1/join_bumper.STL cover.stl] | ||
| + | | | ||
| + | | | ||
| + | |||
| + | |- align="center" | ||
| + | | Cintura | ||
| + | |[[File:MYOD_Waist.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/waist/waist.stl ]] | ||
|1 | |1 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/waist/waist.stl waist.stl] |
| | | | ||
| | | | ||
| + | |||
| + | |- align="center" | ||
| + | | Puerta | ||
| + | |[[File:MYOD_Gate.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/waist/gate.stl ]] | ||
| + | |1 | ||
| + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/waist/gate.stl gate.stl] | ||
| + | | | ||
| + | | Puerta para cerrar el compartimento de la batería en la cintura | ||
|} | |} | ||
| + | |||
===Piernas=== | ===Piernas=== | ||
{| class="wikitable" style="text-align:center" border="0" | {| class="wikitable" style="text-align:center" border="0" | ||
| Line 68: | Line 87: | ||
|- align="center" | |- align="center" | ||
| Pie | | Pie | ||
| − | |[[File:MYOD_Left_foot.png|200px|link=https://github.com/ | + | |[[File:MYOD_Left_foot.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/foot/left_foot_EXTENDED.stl]] |
|2 | |2 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/foot/left_foot_EXTENDED.stl Left_foot.stl] |
| La pieza es el diseño del pie izquierdo, imprimir el derecho espejando esta. | | La pieza es el diseño del pie izquierdo, imprimir el derecho espejando esta. | ||
| | | | ||
| Line 76: | Line 95: | ||
|- align="center" | |- align="center" | ||
| Caja de servo | | Caja de servo | ||
| − | |[[File:MYOD_Half_servo_box.png|200px|link=https://github.com/ | + | |[[File:MYOD_Half_servo_box.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/half_servo_box/half_servo_box.stl]] |
|12 | |12 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/half_servo_box/half_servo_box.stl half_servo_box.stl] |
| | | | ||
| | | | ||
|- align="center" | |- align="center" | ||
| − | | | + | | Ingle |
| − | |[[File:MYOD_Left_hip.png|200px|link=https://github.com/ | + | |[[File:MYOD_Left_hip.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/hip/left_hip_EXTENDED.stl]] |
|2 | |2 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/hip/left_hip_EXTENDED.stl Left_hip.stl] |
| − | | La pieza es el diseño de la | + | | La pieza es el diseño de la ingle izquierda, imprimir la derecha espejando esta. |
| | | | ||
|- align="center" | |- align="center" | ||
| Junta | | Junta | ||
| − | |[[File:MYOD_Joint.png|200px|link=https://github.com/ | + | |[[File:MYOD_Joint.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/joint/joint.stl]] |
|8 | |8 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/joint/joint.stl joint.stl] |
| | | | ||
| | | | ||
| Line 100: | Line 119: | ||
|- align="center" | |- align="center" | ||
| Brazo del tornillo inferior | | Brazo del tornillo inferior | ||
| − | |[[File:MYOD_Lower_left_screw_arm.png|200px|link=https://github.com/ | + | |[[File:MYOD_Lower_left_screw_arm.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/screw_arms/lower_left_screw_arm/lower_left_screw%20arm.stl]] |
|2 | |2 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/screw_arms/lower_left_screw_arm/lower_left_screw%20arm.stl lower_left_screw_arm.stl] |
| − | | | + | |Imprime la izquierda y espeja para la derecha |
| | | | ||
|- align="center" | |- align="center" | ||
| Brazo del tornillo superior | | Brazo del tornillo superior | ||
| − | |[[File:MYOD_Upper_left_screw_arm1.png|200px|link=https://github.com/ | + | |[[File:MYOD_Upper_left_screw_arm1.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/screw_arms/upper_left_screw_arm/upper_left_screw%20arm.stl]] |
|2 | |2 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/screw_arms/upper_left_screw_arm/upper_left_screw%20arm.stl upper_left_screw arm.stl] |
| − | | | + | |Imprime la izquierda y espeja para la derecha |
| | | | ||
|- align="center" | |- align="center" | ||
| Brazo del servo inferior | | Brazo del servo inferior | ||
| − | |[[File:MYOD_Lower_left_servo_arm2.png|200px|link=https://github.com/ | + | |[[File:MYOD_Lower_left_servo_arm2.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/servo_arms/lower_left_servo_arm/lower_left_servo%20arm.stl]] |
|2 | |2 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/servo_arms/lower_left_servo_arm/lower_left_servo%20arm.stl lower_left_servo_arm.stl] |
| − | | | + | |Imprime la izquierda y espeja para la derecha |
| | | | ||
|- align="center" | |- align="center" | ||
| Brazo del servo superior | | Brazo del servo superior | ||
| − | |[[File:MYOD_Upper_left_servo_arm3.png|200px|link=https://github.com/ | + | |[[File:MYOD_Upper_left_servo_arm3.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/servo_arms/upper_left_servo_arm/upper_left_servo%20arm.stl]] |
|2 | |2 | ||
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/legs/servo_arms/upper_left_servo_arm/upper_left_servo%20arm.stl upper_left_servo_arm.stl] |
| − | | | + | |Imprime la izquierda y espeja para la derecha |
| | | | ||
|} | |} | ||
| − | |||
| − | |||
===Brazos=== | ===Brazos=== | ||
| Line 143: | Line 160: | ||
|Detalles | |Detalles | ||
|Tiempo de Impresión | |Tiempo de Impresión | ||
| − | + | |- align="center" | |
| + | | Hombro Izquierdo | ||
| + | |[[File:MYOD_Left_shoulder.png |200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/shoulder/left%20shoulder.stl ]] | ||
| + | |2 | ||
| + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/shoulder/left%20shoulder.stl left_shoulder.stl] | ||
| + | | | ||
| + | | | ||
| + | |- align="center" | ||
| + | | rowspan="2" | | ||
| + | Húmero Izquierdo | ||
| + | |[[File:MYOD_Left_Humerus_1.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/humerus/left%20humerus%20part1.stl ]] | ||
| + | |2 | ||
| + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/humerus/left%20humerus%20part1.stl left_humerus_part1.stl] | ||
| + | | | ||
| + | | | ||
| + | |- align="center" | ||
| + | |[[File:MYOD_Left_Humerus_2.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/humerus/humerus%20part2.stl ]] | ||
| + | |2 | ||
| + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/humerus/humerus%20part2.stl left_humerus_part2.stl] | ||
| + | | | ||
| + | | | ||
|- align="center" | |- align="center" | ||
| − | | | + | | rowspan="2" | |
| − | |[[File: | + | Codo |
| − | | | + | |[[File:MYOD_Elbow_1.PNG|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/forearm/left%20forearm.stl ]] |
| − | | [https://github.com/ | + | |2 |
| + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/forearm/left%20forearm.stl elbow_part1.stl] | ||
| | | | ||
| | | | ||
| − | |||
|- align="center" | |- align="center" | ||
| − | + | |[[File:MYOD_Half_servo_box.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/elbow/elbow%20part2%20%28half%20servo%20box%29.stl ]] | |
| − | |[[File: | + | |2 |
| − | | | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/elbow/elbow%20part2%20%28half%20servo%20box%29.stl elbow_part2 (half servo box).stl] |
| − | | [https://github.com/ | ||
| | | | ||
| | | | ||
| + | |||
|- align="center" | |- align="center" | ||
| − | | | + | | Antebrazo Izquierdo |
| − | |[[File: | + | |[[File:MYOD_Left_forearm.png|200px|link=https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/forearm/left%20forearm.stl ]] |
| − | | | + | |2 |
| − | | [https://github.com/ | + | | [https://github.com/myod-robotics/MYOD/blob/master/parts/myod_beta/arms/forearm/left%20forearm.stl left_forearm.stl] |
| | | | ||
| | | | ||
| + | |||
|} | |} | ||
| + | ==Montaje== | ||
| + | ===Vídeo=== | ||
| + | {| class="wikitable" style="text-align:center" border="0" | ||
| + | | | ||
| + | <youtube size=big>SuAKVGFDFOE</youtube> <br> '''MYOD - Ensamblaje''' <br>[http://www.youtube.com/watch?v=49jXs6LV_u0 Enlace directo al vídeo en Youtube] | ||
| + | |} | ||
| + | {| class="wikitable" style="text-align:center" border="0" | ||
| + | | | ||
| + | <youtube size=big>0MvoLhOvGcU</youtube> <br> '''MYOD - Ensamblaje''' <br>[https://www.youtube.com/watch?v=0MvoLhOvGcU Enlace directo al vídeo en Youtube] | ||
| + | |} | ||
==Sensores== | ==Sensores== | ||
| Line 249: | Line 297: | ||
| [[File:mg995.jpg|200px]] | | [[File:mg995.jpg|200px]] | ||
| '''STANDARD''' | | '''STANDARD''' | ||
| − | TowePro | + | TowePro MG996R |
| + | peso: 59 gramos | ||
| + | |||
| + | |||
| + | [http://www.servodatabase.com/servo/towerpro/mg995 Características] | ||
| + | |||
| + | |||
| + | |- align="center" | ||
| + | | [[File:|200px]] | ||
| + | | '''STANDARD''' | ||
| + | Futaba 3003 | ||
| + | peso= 41 gramos | ||
| + | |||
| + | |||
[http://www.servodatabase.com/servo/towerpro/mg995 Características] | [http://www.servodatabase.com/servo/towerpro/mg995 Características] | ||
Latest revision as of 19:31, 7 May 2015

El proyecto MYOD es una iniciativa llevado a cabo por alumnos de ingeniería que tiene como objetivo el desarrollo, construccion y programación de un robot mini-humanoide.
Con MYOD, queremos crear un robot con cuatro características principales:
- Libre: Tanto las piezas mecánicas como el software que se desarrolle serán publicadas dia a dia, permitiendo que cualquiera pueda acceder a los planos y replicar su propio robot.
- Accesible: En MYOD no se usará ningun componente propio de una marca, sino que usando medidas standard, será compatible con diferentes modelos de actuadores, sensores y controladoras.
- Imprimible: Todas las piezas se diseñarán para que puedan imprimirse fácilmente con una impresora 3D.
- Barato: Las plataformas comunes suelen ser bastante caras y usualmente prohibitivas al público general. En MYOD queremos romper con esto, adoptando la filosofia low-cost para abaratar costes.
Listado de robots humanoides de la asociación.
Redes Sociales
| Social Media | ||||
|---|---|---|---|---|

|
||||
Componentes
Piezas Imprimibles
Todas las piezas están sujetas a cambios, el diseño aún no es definitivo.
Pecho
| Pieza | Imagen | Cantidad | Enlace | Detalles | Tiempo de Impresión |
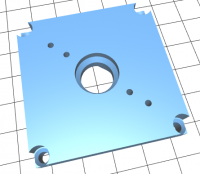
| Pecho | 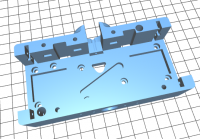
|
1 | chest.stl | ||
| Pechera | 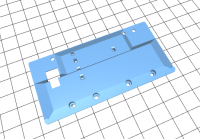
|
1 | bumper.stl | ||
| Cubierta | 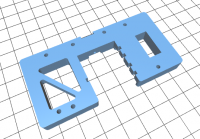
|
1 | cover.stl | ||
| Cintura | 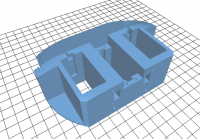
|
1 | waist.stl | ||
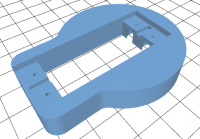
| Puerta | 
|
1 | gate.stl | Puerta para cerrar el compartimento de la batería en la cintura |
Piernas
| Pieza | Imagen | Cantidad | Enlace | Detalles | Tiempo de Impresión |
| Pie | 
|
2 | Left_foot.stl | La pieza es el diseño del pie izquierdo, imprimir el derecho espejando esta. | |
| Caja de servo | 
|
12 | half_servo_box.stl | ||
| Ingle | 
|
2 | Left_hip.stl | La pieza es el diseño de la ingle izquierda, imprimir la derecha espejando esta. | |
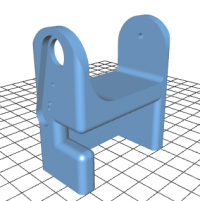
| Junta | 
|
8 | joint.stl | ||
| Brazo del tornillo inferior | 
|
2 | lower_left_screw_arm.stl | Imprime la izquierda y espeja para la derecha | |
| Brazo del tornillo superior | 
|
2 | upper_left_screw arm.stl | Imprime la izquierda y espeja para la derecha | |
| Brazo del servo inferior | 
|
2 | lower_left_servo_arm.stl | Imprime la izquierda y espeja para la derecha | |
| Brazo del servo superior | 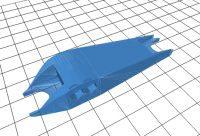
|
2 | upper_left_servo_arm.stl | Imprime la izquierda y espeja para la derecha |
Brazos
| Pieza | Imagen | Cantidad | Enlace | Detalles | Tiempo de Impresión |
| Hombro Izquierdo | 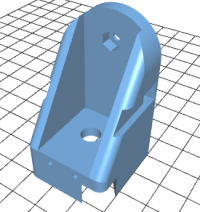
|
2 | left_shoulder.stl | ||
|
Húmero Izquierdo |
|
2 | left_humerus_part1.stl | ||
|
2 | left_humerus_part2.stl | |||
|
Codo |
|
2 | elbow_part1.stl | ||
|
|
2 | elbow_part2 (half servo box).stl |
| ||
| Antebrazo Izquierdo | 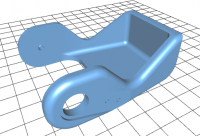
|
2 | left_forearm.stl |
|
Montaje
Vídeo
|
|
|
|
Sensores
Distancia

|
INFRARROJOS
Sharp IR GP2Y0A21YK0F |

|
ULTRASONIDOS
HC-SR04 |

|
ULTRASONIDOS
SRF02
|
Inerciales

|
BRUJULA 1DOF
CMPS03 |
| MAGNETOMETRO 3DOF
| |
| GIROSCOPO 3DOF
| |
| ACELEROMETRO 3DOF
|
Otros
Actuadores
Servos PWM

|
STANDARD
TowePro MG996R peso: 59 gramos
|
| [[File:|200px]] | STANDARD
Futaba 3003 peso= 41 gramos
|

|
MICRO
TowerPro MG90S |
Electrónica

|
ARDUINO
Arduino UNO |

|
ARDUINO-MEGA
Arduino MEGA |

|
RASPBERRY PI |
Contacto
Si quieres participar en el proyecto y/o tienes alguna pregunta, por favor, no dudes en enviar un e-mail a javier.isabel.hernandez[at]gmail.com o a myodrobotica[at]gmail.com
