Difference between revisions of "Proyecto Ecro"
Jgvictores (talk | contribs) |
Jgvictores (talk | contribs) |
||
| Line 7: | Line 7: | ||
* Ana de Prado Navarrete | * Ana de Prado Navarrete | ||
* Angel Mate | * Angel Mate | ||
| + | * Diego de Blas Luna | ||
* Guillermo Álvarez Martinez -> Interfaz gráfica de monitorización | * Guillermo Álvarez Martinez -> Interfaz gráfica de monitorización | ||
* Helen Medina | * Helen Medina | ||
Revision as of 09:50, 27 October 2010
Introducción
Dentro de la Asociación de Robótica se ha creado esta línea de trabajo para el diseño y desarrollo de un robot móvil para aplicaciones civiles. Las líneas de investigación incluyen tanto diseño mecatrónico como desarrollo software. Para la comunicación interna hemos creado un grupo de google. Si eres miembro de la asociación y te interesa contribuir en esta línea de investigación, pide acceso al responsable correspondiente.
Personal y Líneas de Investigación
- Alex Aguilar
- Alex Alvarado -> Monitorización baterías
- Ana de Prado Navarrete
- Angel Mate
- Diego de Blas Luna
- Guillermo Álvarez Martinez -> Interfaz gráfica de monitorización
- Helen Medina
- Idulfo Arrocha
- Javier Moreno -> Montaje y análisis estructural
- Jorge Agudo Martín -> GPS
- Jose Ignacio Manzano -> Control por mando X-box
- Juan G. Víctores
- María Ramos Montero
- Mario Acevedo -> Cámara 3-D
- Mario Almagro
- Santiago Morante -> Integración de dispositivos externos
- Sergio Viches -> Netbook, (motores)
Álbum de Fotos
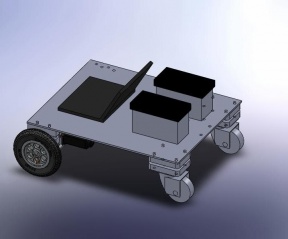 Modelos CAD |
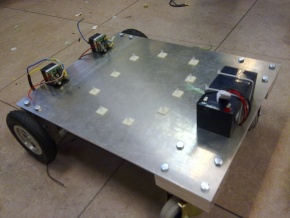
 Fotos de la Reunión del 16-04-2010 |
 Fotos de la Reunión del 30-04-2010 |
 Fotos de la Reunión del 07-05-2010 |
Álbum de Vídeos
Captura de la rueda en movimiento durante la Reunión del 16-04-2010 Enlace directo al vídeo en Youtube |
Captura de la plataforma en movimiento durante la Reunión del 30-04-2010 Enlace directo al vídeo en Youtube |
Actas de Reuniones
[ RCT_10-02-2010 ] [ RCT_16-04-2010 ] [ RCT_30-04-2010 ] [ RCT_07-05-2010 ] [ RCT_14-05-2010 ] [ RCT_21-05-2010 ]
Totalidad de Componentes Adquiridos
- Conjuntos rueda, motor, encoder. Especificaciones
- Controlador (driver). Especificaciones
- Netbook Lenovo (mini-portátil)
- GPS Garmin. Especificaciones
- Ruedas simples y locas
- Pack Baterías
- Cámara 3-D Minoru
- Mando Xbox
- Plancha soporte del robot móvil
Información Técnica para el Desarrollo
Enlaces de proyectos relacionados
Ejemplo de un robot parecido al nuestro hecho con una plataforma de madera. Lleva neones!!!
http://forums.parallax.com/forums/default.aspx?f=10&m=414706 --> Enlace roto. Mejor: http://forums.parallaxinc.com/forums/default.aspx?f=10&m=414706
Control de los motores desde el Netbook
$ sudo modprobe usbserial vendor=0403 product=6001
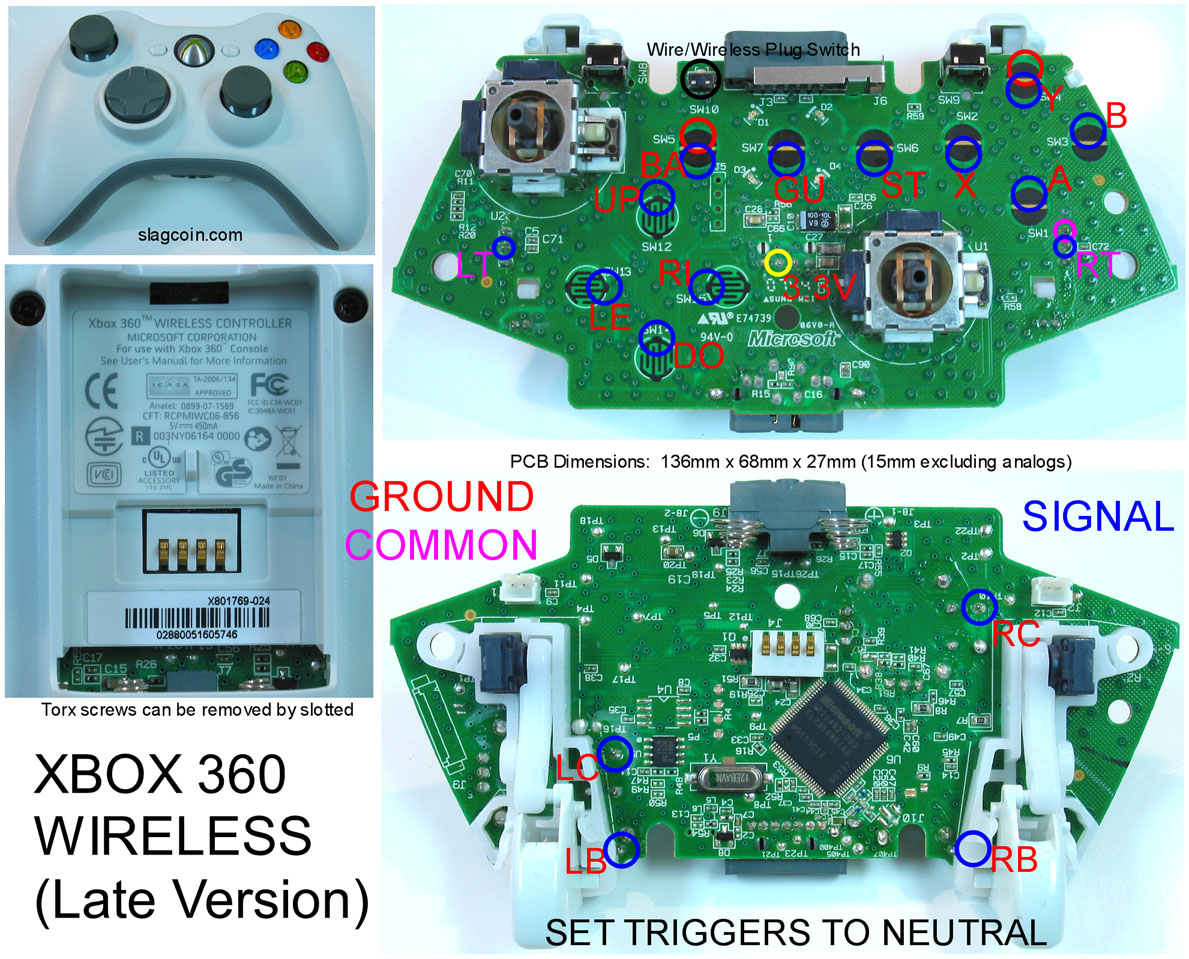
Enlaces de interés para el mando de la XBox
http://www.slagcoin.com/joystick/pcb_wiring.html#PCB_DIAGRAMS
http://github.com/Grumbel/xboxdrv/ <-- El driver que nos sirve
Enlaces a proyectos con la cámara Minoru
http://www.youtube.com/watch?v=5G5MBjsmcuU
http://code.google.com/p/sentience/wiki/MinoruWebcam
http://nma.web.nitech.ac.jp/fukushima/minoru/minoru3D-e.html
Instalación de Ubuntu en el Netbook del robot
El robot consta de un portátil Lenovo al que hemos decidido instalarle una distribución Linux (en este caso, Ubuntu). Para ello, y dado que el portátil no tiene unidad de DVD, hay que recurrir a una instalación por pendrive USB, y que puede hacerse en cuatro pasos:
- Descargar una ISO de Ubuntu desde la web oficial (en este caso el link es [1])
- Crear un USB con la imágen (instrucciones aquí [2]). Para hacerlo desde un ordenador con Ubuntu instalado, basta con ir a Sistema-Administración-Crear disco de inicio USB.
- Insertar el pendrive en el portátil, encenderlo y esperar a que arranque Ubuntu desde el pendrive. Si esto no funcionase, revisar la configuración de la BIOS y ver si está activada la opción de arranque USB.
- Ya dentro del SO del portátil, pulsar el icono "Instalación" y seguir las instrucciones.