Difference between revisions of "Proyecto Ecro"
Jump to navigation
Jump to search
Jgvictores (talk | contribs) |
Jgvictores (talk | contribs) |
||
| Line 67: | Line 67: | ||
{| class="bluetable" style="text-align:center" border="0" | {| class="bluetable" style="text-align:center" border="0" | ||
! align="center" style="width:20%" colspan="56" | Enlaces de proyectos relacionados | ! align="center" style="width:20%" colspan="56" | Enlaces de proyectos relacionados | ||
| − | |- | + | |- |
| Ejemplo de un robot parecido al nuestro hecho con una plataforma de madera. Lleva neones!!! | | Ejemplo de un robot parecido al nuestro hecho con una plataforma de madera. Lleva neones!!! | ||
| − | http://forums.parallax.com/forums/default.aspx?f=10&m=414706 | + | * Enlace roto: http://forums.parallax.com/forums/default.aspx?f=10&m=414706 |
| + | * Mejor: http://forums.parallaxinc.com/forums/default.aspx?f=10&m=414706 | ||
|} | |} | ||
Revision as of 13:14, 7 November 2010
Bienvenidos a la Wiki del ROBOT CIVIL DE TIERRA
|
|---|
| Podrás encontrar enlaces a otros Proyectos de la Asociación de Robótica en la página principal de la Wiki Asociación de Robótica.
El objetivo de este Proyecto es el diseño y desarrollo de un robot móvil para aplicaciones de ayuda a la población civil. Las líneas de investigación incluyen tanto diseño mecatrónico como desarrollo software de control y algoritmos de alto nivel. Te invitamos a que pases a formar parte de nuestro equipo. ¡No dudes en contactar con nosotros! |
| Componentes Robóticos del Robot Civil de Tierra | |||||
|---|---|---|---|---|---|
| ESTRUCTURA | GPS GARMIN | NETBOOK | RUEDAS | VISIÓN | XPAD |
| Repositorio basado en Subversion (SVN) |
|---|
| Álbum de Fotos | |||
|---|---|---|---|
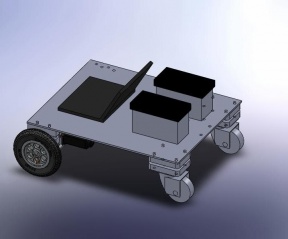 Modelos CAD |
 Fotos de la Reunión del 16-04-2010 |
 Fotos de la Reunión del 30-04-2010 | |
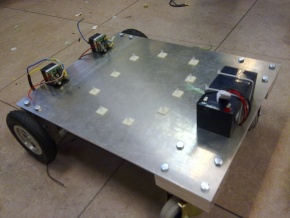 Fotos de la Reunión del 07-05-2010 |
|||
| Álbum de Vídeos | |
|---|---|
Captura de la rueda en movimiento durante la Reunión del 16-04-2010 Enlace directo al vídeo en Youtube |
Captura de la plataforma en movimiento durante la Reunión del 30-04-2010 Enlace directo al vídeo en Youtube |
| Actas de Reuniones | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [ RCT_10-02-2010 ] | [ RCT_16-04-2010 ] | [ RCT_30-04-2010 ] | [ RCT_07-05-2010 ] | [ RCT_14-05-2010 ] | [ RCT_21-05-2010 ] | ||||||||||||||||||||||||||||||||||||||||||||||||||
| [ RCT_29-10-2010 ] | [ RCT_05-11-2010 ] | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Enlaces de proyectos relacionados | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ejemplo de un robot parecido al nuestro hecho con una plataforma de madera. Lleva neones!!! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||