Difference between revisions of "Modelo Simple"
Jump to navigation
Jump to search
| Line 3: | Line 3: | ||
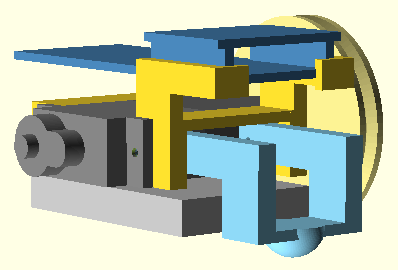
<p style="text-align=left;">Debido a la poca precision para piezas pequeñas de la impresora, el soporte para la canica requeria de limado para que encaje bien la propia canica. En este nuevo modelo, no hay canica y el robot arrastra una parte trasera con forma semiesferica como puede verse en la imagen.</p> | <p style="text-align=left;">Debido a la poca precision para piezas pequeñas de la impresora, el soporte para la canica requeria de limado para que encaje bien la propia canica. En este nuevo modelo, no hay canica y el robot arrastra una parte trasera con forma semiesferica como puede verse en la imagen.</p> | ||
| − | < | + | <center> [[File:EnsambladoModeloSimple.png | modelo simple]] </center> |
Revision as of 12:58, 24 January 2013
Este modelo se ha pensado en un principio para un primer curso de robot + Arduino.
Debido a la poca precision para piezas pequeñas de la impresora, el soporte para la canica requeria de limado para que encaje bien la propia canica. En este nuevo modelo, no hay canica y el robot arrastra una parte trasera con forma semiesferica como puede verse en la imagen.
