Proyecto Ecro
Revision as of 16:34, 29 October 2010 by Jgvictores (talk | contribs)
Dentro de la Asociación de Robótica se ha creado esta línea de trabajo para el diseño y desarrollo de un robot móvil para aplicaciones civiles. Las líneas de investigación incluyen tanto diseño mecatrónico como desarrollo software. Para la comunicación interna hemos creado un grupo de google. Personal y líneas de investigación.
- Alex Aguilar
- Alex Alvarado -> Monitorización baterías
- Ana de Prado Navarrete
- Angel Mate
- Diego de Blas Luna -> Visión 3D
- Guillermo Álvarez Martinez -> Interfaz gráfica de monitorización
- Helen Medina
- Idulfo Arrocha
- Javier Moreno -> Montaje y análisis estructural
- Jorge Agudo Martín -> GPS
- Jose Ignacio Manzano -> Control por mando X-box
- Juan G. Víctores
- María Ramos Montero
- Mario Acevedo -> Cámara 3-D
- Mario Almagro
- Santiago Morante -> Integración de dispositivos externos
- Sergio Viches -> Netbook, (motores)
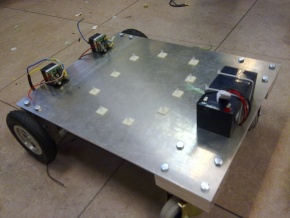
Álbum de Fotos
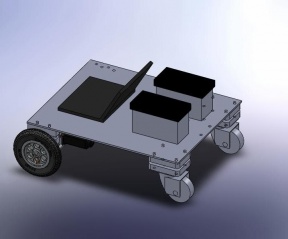 Modelos CAD |
 Fotos de la Reunión del 16-04-2010 |
 Fotos de la Reunión del 30-04-2010 |
 Fotos de la Reunión del 07-05-2010 |
Álbum de Vídeos
Captura de la rueda en movimiento durante la Reunión del 16-04-2010 Enlace directo al vídeo en Youtube |
Captura de la plataforma en movimiento durante la Reunión del 30-04-2010 Enlace directo al vídeo en Youtube |
Actas de Reuniones
[ RCT_10-02-2010 ] [ RCT_16-04-2010 ] [ RCT_30-04-2010 ] [ RCT_07-05-2010 ] [ RCT_14-05-2010 ] [ RCT_21-05-2010 ]
Componentes Robóticos
- XPAD
- Cámara MINORU
- GPS GARMIN
- NETBOOK
- RUEDAS
- ESTRUCTURA
Enlaces de proyectos relacionados
Ejemplo de un robot parecido al nuestro hecho con una plataforma de madera. Lleva neones!!!
http://forums.parallax.com/forums/default.aspx?f=10&m=414706 --> Enlace roto. Mejor: http://forums.parallaxinc.com/forums/default.aspx?f=10&m=414706