Colonia de robots
Objetivos
- Aprender sobre sensorización para mini-robots.
- Aprender sobre actuadores para mini-robots.
- Programar en Arduino.
Diseño
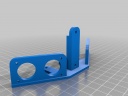
| Modelos 3D | ||
|---|---|---|

|
|

|
| Protobot (chasis) | Sensores (US / IR) | Ruedas |
Hardware
| Microcontroladores | |
|---|---|

| |
| Arduino UNO | |
| Sensores | |
| 128px | 128px |
| Ultrasonido (US) | Infrarojos (IR) |
| Actuadores | |

| |
| Servomotores (Futaba S3003) | |
| Comunicaciones | |
| 128px | |
| Bluetooth | |
{kind=link}
Software
Repositorio
En el siguiente enlace podréis ver de manera online el repositorio.
Para poder trabajar con el repositorio, en la ubicación deseada abrir una terminal y poner lo siguiente:
svn checkout --username=name svn+ssh://name@svn.code.sf.net/p/asrob/svn/rpc/ rpc
NOTA: cambiar name por el nombre de usuario de Sourceforge.
Para más información sobre el uso de SVN seguir este tutorial.
Arduino
Para la programación se usa el IDE de Arduino (v1.0 o superior).
Enlace para descarga de las versiones para Linux, Windows y Mac OS X.
Calibración servomotores
- Robot RPM
- MD: 90 | MI: 90
| Calibraciones | ||||
|---|---|---|---|---|
| MI: / MD: | MI: / MD: | MI: 89 / MD: 90 | MI: 90 / MD: 90 | MI: 90 / MD: 90 |
| RB1 | RB2 | RB3 | RB4 | RB5 |
| MI: / MD: | MI: / MD: | MI: / MD: | MI: / MD: | MI: / MD: |
| T01 | T02 | T03 | T04 | T05 |
| MI: / MD: | MI: / MD: | MI: / MD: | MI: / MD: | MI: / MD: |
| T06 | T07 | T08 | T09 | T10 |
| MI: / MD: | MI: / MD: | MI: / MD: | MI: / MD: | MI: / MD: |
| T11 | T12 | T13 | T14 | T15 |
Enlaces de interés
Multimedia
Galería de imágenes y vídeos.
![]() Este obra está bajo una licencia de Creative Commons Reconocimiento-CompartirIgual 3.0 Unported.
Este obra está bajo una licencia de Creative Commons Reconocimiento-CompartirIgual 3.0 Unported.