Difference between revisions of "HMI Experiment Architecture"
Jump to navigation
Jump to search
| Line 43: | Line 43: | ||
[[File:Trajectories openrave.pdf|500px|border]] | [[File:Trajectories openrave.pdf|500px|border]] | ||
| + | |||
| + | Example usage of trajectory visualizer. | ||
== Sources on HMI Experiments == | == Sources on HMI Experiments == | ||
TODO | TODO | ||
Revision as of 11:38, 11 April 2011
Objectives
TODO
Experiment Simulators
![]()
Tracking-type environment (target and user cursor shown).

Steering law-type environment (lines are obstacles).

Fitts' law-type environment (lines are markers only).

More complex task example - put can in cabinet.

More complex task example - put can in cabinet.
Experiment Management
TODO
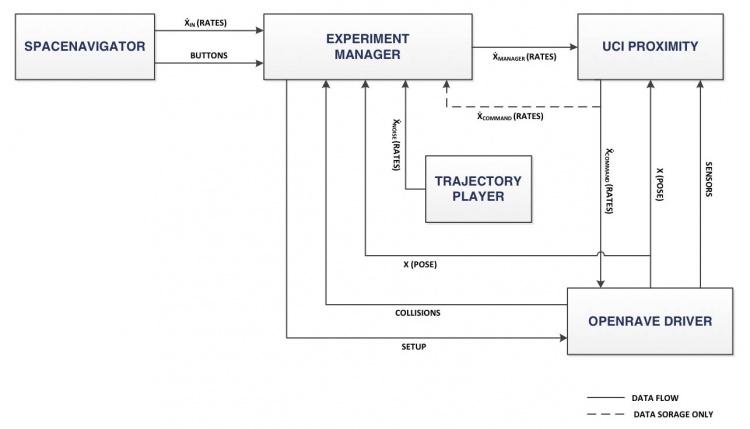
Example of setup for a virtual shared-control experiment.
Simulated Disabilities
TODO
Trajectory Visualizer
TODO
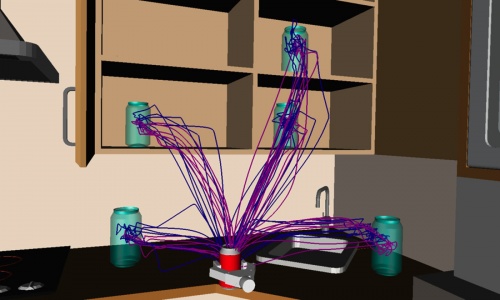
Example usage of trajectory visualizer.
Sources on HMI Experiments
TODO