Difference between revisions of "HMI Experiment Architecture"
Jump to navigation
Jump to search
| (4 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
== Objectives == | == Objectives == | ||
| − | |||
== Experiment Setups == | == Experiment Setups == | ||
| − | * | + | * [[IROS2011_setup|Setup for IROS 2011 experiments]] |
== Experiment Simulators == | == Experiment Simulators == | ||
| Line 11: | Line 10: | ||
| − | + | == Experiment Network == | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | == Experiment | ||
TODO | TODO | ||
| Line 37: | Line 17: | ||
Example of setup for a virtual shared-control experiment. | Example of setup for a virtual shared-control experiment. | ||
| − | |||
| − | |||
== Trajectory Visualizer == | == Trajectory Visualizer == | ||
Latest revision as of 10:27, 30 September 2011
Objectives
Experiment Setups
Experiment Simulators
![]()
Tracking-type environment (target and user cursor shown).
Experiment Network
TODO
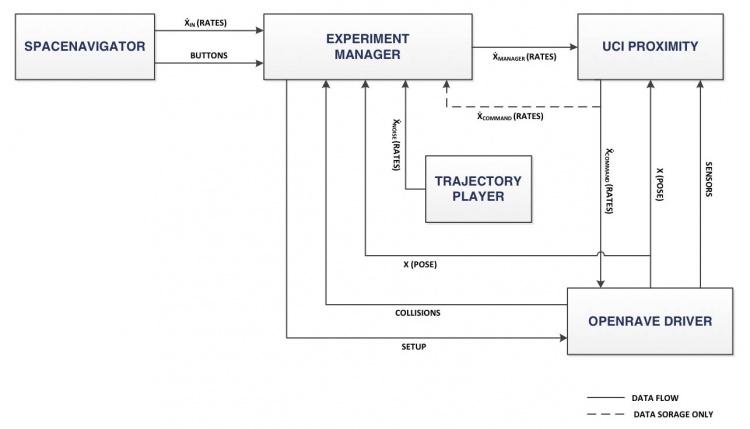
Example of setup for a virtual shared-control experiment.
Trajectory Visualizer
TODO
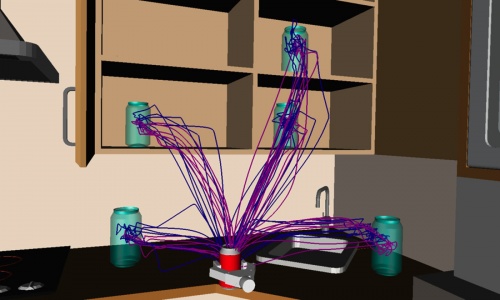
Example usage of trajectory visualizer.
Sources on HMI Experiments
TODO