Difference between revisions of "Main Page"
Jump to navigation
Jump to search
Jgvictores (talk | contribs) |
Jgvictores (talk | contribs) |
||
| (29 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
__NOTITLE__ | __NOTITLE__ | ||
| + | == IMPORTANTE! LEER PRIMERO!! == | ||
| − | + | * [https://roboticslab-uc3m.github.io/developer-manual Manual de desarrollador] | |
| − | |||
| − | * | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
== AVISO IMPORTANTE: Al proceder, se aceptan las condiciones anteriores == | == AVISO IMPORTANTE: Al proceder, se aceptan las condiciones anteriores == | ||
| Line 41: | Line 20: | ||
{| class="purpletable" style="width:100%" | {| class="purpletable" style="width:100%" | ||
|- | |- | ||
| − | ! AVISO IMPORTANTE | + | ! AVISO(S) IMPORTANTE(S) |
|- align="center" | |- align="center" | ||
| En caso de ''enterarte de la existencia de una DEMO'', por favor ENVÍA YA email con fecha/hora y/o toda la información posible<br> | | En caso de ''enterarte de la existencia de una DEMO'', por favor ENVÍA YA email con fecha/hora y/o toda la información posible<br> | ||
| Line 51: | Line 30: | ||
! colspan="2" | Recursos adicionales | ! colspan="2" | Recursos adicionales | ||
|- align="center" | |- align="center" | ||
| − | | style="width:50%" | [[File:Tutorial.jpg|100px|border|link= | + | | style="width:50%" | [[File:Tutorial.jpg|100px|border|link=https://asrob-uc3m.gitbooks.io/tutoriales]]<br>[https://asrob-uc3m.gitbooks.io/tutoriales Tutorials] |
| [https://youtu.be/qdV3XtPIrMI Impresora pasillo] | | [https://youtu.be/qdV3XtPIrMI Impresora pasillo] | ||
|} | |} | ||
Latest revision as of 11:40, 14 May 2021
IMPORTANTE! LEER PRIMERO!!
AVISO IMPORTANTE: Al proceder, se aceptan las condiciones anteriores
Gracias!
Welcome to the Asibot & HOAP3 & TEO Wiki
| ||
|---|---|---|
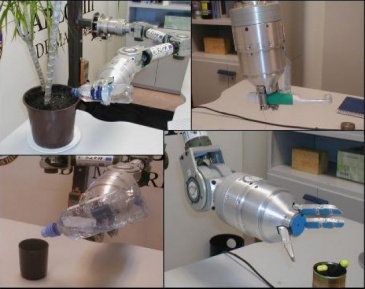 ASIBOT |
 HOAP3 |
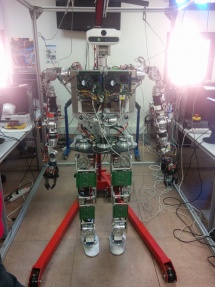 TEO |
| AVISO(S) IMPORTANTE(S) |
|---|
| En caso de enterarte de la existencia de una DEMO, por favor ENVÍA YA email con fecha/hora y/o toda la información posible Nuestro hilo email se llama AVISO DEMOSTRACION. |
| Recursos adicionales | |
|---|---|
 Tutorials |
Impresora pasillo |