Difference between revisions of "Main Page"
Jump to navigation
Jump to search
Jgvictores (talk | contribs) |
Jgvictores (talk | contribs) |
||
| Line 8: | Line 8: | ||
|| <br>[[File:hoap3.png|160px|border|link=HOAP3]]<br>[[HOAP3|'''HOAP3''']]<br> | || <br>[[File:hoap3.png|160px|border|link=HOAP3]]<br>[[HOAP3|'''HOAP3''']]<br> | ||
|| <br>[[File:teo_lab_2014.jpg|border|215px|link=TEO]]<br>[[TEO|'''TEO''']]<br> | || <br>[[File:teo_lab_2014.jpg|border|215px|link=TEO]]<br>[[TEO|'''TEO''']]<br> | ||
| + | |} | ||
| + | |||
| + | {| class="wikitable" style="width:100%" | ||
| + | |- | ||
| + | ! colspan="1" | General To Do's | ||
| + | |- | ||
| + | | | ||
| + | * Better preparation for demos: | ||
| + | ** Problem: Number of people who know the fact that there will be a demo. | ||
| + | *** Solution: Urgent mailingList/telegram/whatsapp group? Status: will decide and implement after IROS2016 deadline. | ||
| + | ** Problem: Number of people who actually know how to perform a demo. | ||
| + | *** Solution: More documentation? Videos? Training? Status: will decide and implement after IROS2016 deadline. | ||
| + | ** Problem: Battery may fail during or before demo. | ||
| + | *** Solution: Battery and power source improvements. Status: on the way! | ||
| + | ** Problem: Too many hands on robot PCs. | ||
| + | *** Solution 1: Only one demo: all should be integrated in same application. Status: will do after IROS2016 deadline. | ||
| + | *** Solution 2: Create one partition per PC freezed at working demo: no experimental programs/drivers, missing packages, and/or programs/libraries compiled with deactivated functions. Status: will do after IROS2016 deadline. | ||
| + | ** Problem: Missing/failing hardware. | ||
| + | *** Solution: ? | ||
|} | |} | ||
Revision as of 12:00, 25 February 2016
Welcome to the Asibot & HOAP3 & TEO Wiki
The Wiki for Asibot & HOAP3 & RH2 @ RoboticsLab @ UC3M
| ||
|---|---|---|
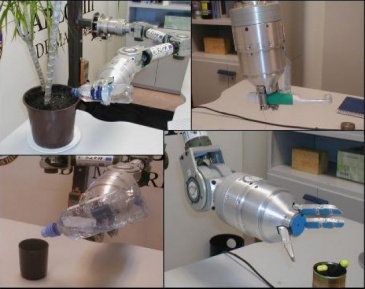 ASIBOT |
 HOAP3 |
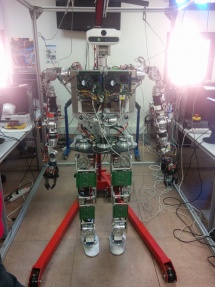 TEO |
| General To Do's |
|---|
|
| Other resources |
|---|
 Tutorials |