Difference between revisions of "Camara Omnidireccional"
Jump to navigation
Jump to search
Frcanadillas (talk | contribs) |
Frcanadillas (talk | contribs) |
||
| Line 38: | Line 38: | ||
= Enlaces de Interes = | = Enlaces de Interes = | ||
| − | + | == Camaras Omnidireccionales == | |
* "DIY" camara omnidirrecional [http://dasl.mem.drexel.edu/Hing/tutorials/omnicam/homebrew_omnicam.htm] | * "DIY" camara omnidirrecional [http://dasl.mem.drexel.edu/Hing/tutorials/omnicam/homebrew_omnicam.htm] | ||
| Line 48: | Line 48: | ||
* Lens Option Set for SRV-1 Blackfin Camera [http://surveyor-corporation.stores.yahoo.net/srwianleset.html] | * Lens Option Set for SRV-1 Blackfin Camera [http://surveyor-corporation.stores.yahoo.net/srwianleset.html] | ||
| − | + | == Cámaras == | |
* [http://www.cmucam.org] cmucam.org | * [http://www.cmucam.org] cmucam.org | ||
Revision as of 16:39, 2 June 2011
Descripción del Proyecto
- Responsables:
- Félix Rodríguez Cañadillas (Proyecto Fin de Carrera).
- Tutor: Martin F. Stoelen.
- Director: Alberto Jardón Huete.
Objetivos
Desarollar una cámara omnidireccional de tamaño pequeño para robots mini humanoides y aeriales. Objetivos específicos:
- Integrar cámara con una configuración omnidireccional mediante espejo de forma cónica, parabólica o esférico.
- Desarollar y implementar algoritmos para evitar obstaculos.
- Desarollar y implementar algoritmos para detectar movimientos.
- Definir y implementar comunicaciones (probablamente de forma serie).
Progreso
Estudio de la configuración omnidireccional utilizada
- Cámara SRV-1 Blackfin con lente "fisheye" comprado.
- Estudio del campo de visión utilizando lente "fisheye":


- Realización de un soporte e implantación de la cámara en él:

Algoritmos de visión
Desarrollo de los algoritmos de visión a través de Matlab.
- Cálculo de la distancia a obstaculos estáticos.
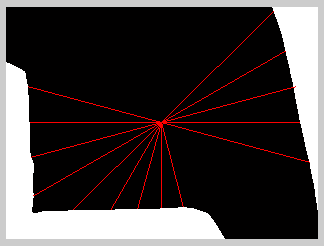
- Cálculamos la distancia entre el centro de la imagen y la frontera entre el suelo y los obstaculos, mediante la diferenciación de colores (blanco y verde).


- Detección de movimiento y cálculo de este.
- Cálculo del flujo óptico generado por nuestro propio movimiento.
Enlaces de Interes
Camaras Omnidireccionales
- "DIY" camara omnidirrecional [1]
- VSTONE - camaras omnidireccionales [2]
- Lentes "fisheye" para camaras pequenas [3]
- Lens Option Set for SRV-1 Blackfin Camera [4]
Cámaras
- [5] cmucam.org
- [6] cmucam3 en superrobotica.com
- [7] POB-EYE II
- [8] Surveyor Blackfin