Camara Omnidireccional
Jump to navigation
Jump to search
Descripción del Proyecto
- Responsables:
- Félix Rodríguez Cañadillas (Proyecto Fin de Carrera).
- Tutor: Martin F. Stoelen.
- Director: Alberto Jardón Huete.
Objetivos
Desarollar una cámara omnidireccional de tamaño pequeño para robots mini humanoides y aeriales. Objetivos específicos:
- Integrar cámara con una configuración omnidireccional mediante espejo de forma cónica, parabólica o esférico.
- Desarollar y implementar algoritmos para evitar obstaculos.
- Desarollar y implementar algoritmos para detectar movimientos.
- Definir y implementar comunicaciones (probablamente de forma serie).
Progreso
Elección de la cámara a utilizar
- La cámara elejida para la relización de este proyecto ha sido la Surveyor Blackfin Camara.

Estudio de la configuración omnidireccional utilizada
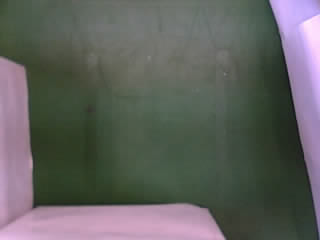
- Utililizamos la Cámara SRV-1 Blackfin con lente "fisheye".
- Estudio del campo de visión utilizando lente "fisheye"(120º):


- Realización de un soporte e implantación de la cámara en él:

Algoritmos de visión
Desarrollo de los algoritmos de visión a través de Matlab.
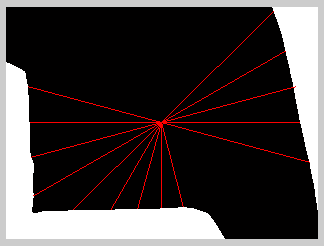
- Cálculo de la distancia a obstaculos estáticos.
- Cálculamos la distancia entre el centro de la imagen y la frontera entre el suelo y los obstaculos, mediante la diferenciación
de colores (blanco y verde).


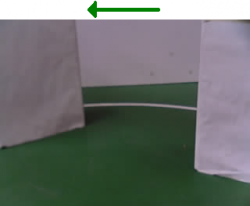
- Detección de movimiento y cálculo de este.
- Mediante la utilización de la teoría de la imagen diferencia calculamos el centroide del movimiento captado. - Utilizando los centroides de dos imágenes diferencia generarémos el vector del movimiento captado.







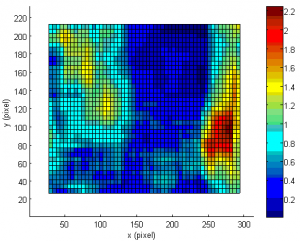
- Cálculo del flujo óptico generado por nuestro propio movimiento.
- A causa del movimiento de nuestro robot se produce un flujo en la imagen denominado flujo óptico.
- Hemos utilizado la teoría del flujo óptico con brillo constante para calcular este flujo.


Enlaces de Interés
Memoria del Proyecto Fin de Carrera.
- Memoria del Proyecto Fin de Carrera (PDF).
Configuraciones Omnidireccionales
- "DIY" cámara omnidirrecional [1]
- VSTONE - cámaras omnidireccionales [2]
- Lentes "fisheye" para cámaras pequeñas [3]
- Lens Option Set for SRV-1 Blackfin Camera [4]
Cámaras
- CMUcam3: Open Source Programmable Embedded Color Vision Platform [5]
- CMUCAM3 Sensor de visión para robot S320200 [6]
- POB-EYE II [7]
- Surveyor Blackfin [8]
Referencias de Algoritmos de Visión utilizados
- David Cooms & Karen Roberts (1993), “Centering Behavior Using Peripheral Vision”, in proceedings of Computer Vision and Pattern Recognition (CVPR ´93),New York, pp. 440-445. [9]
- Kahlouche Souhila and Achour Karim (2008). “Optical Flow based Robot Obstacle Avoidance”, International Journal of Advanced Robotic Systems, ISSN:1729-8806, InTech. pp. 13-16. [10]